- 홈
- Research
- ASV
- Control system
Research
Control system
연구 내용
제어 알고리즘 성능 비교 및 선정
![]()
[ Comparison of controller performance in way-point tracking simulation ]
- 자유항주 및 실해역 시험 대비, PD(선형제어), LQR(최적제어), Feedback linearization(비선형 제어) 알고리즘 성능 비교
- PD 제어기가 제어이득 조정 용이성 측면에서 선정 및 물리시험 적용
제어이득 조정 알고리즘 개발
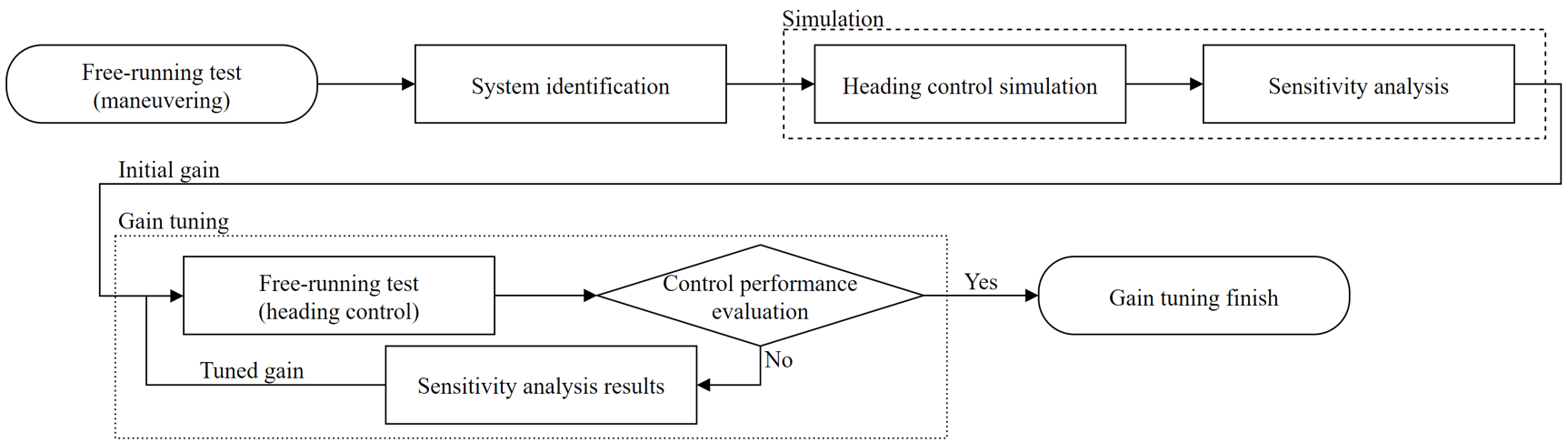
[ Block diagram of gain tuning algorithm ]

[ Sensitivity analysis of control performance ]
[ Comparison of controller performance after gain tuning in model test ]
[ Autonomous navigation test of Haeyang Nuri ]
[ Autonomous navigation test of container ship (POS Singapore) ]
- 효율적이고 정확한 제어이득 조정을 위한 시뮬레이션 기반 최적 제어이득 도출 알고리즘 개발
- 민감도 해석을 통한 제어 성능 향상 및 비용 단축 효과 입증
- 2m급 모형선, 20m급 시험선(해양누리호), 160m급 컨테이너선 적용