- 홈
- Research
- ASV
- Docking system
Research
Docking system
연구 내용
무인수상선의 자동 이/접안 시스템 개발
[ Model test of autonomous docking system based on symbol recognition ]
[ Model test of autonomous docking system based on symbol recognition ]
[ Model test of autonomous docking system based on symbol recognition ]
- 마리나 내 무인수상선이 도크에 자동이/접안 하기 위한 정밀한 상태 추정 및 유도 알고리즘 필요
- 정밀한 데이터 계측을 위한, 카메라와 LiDAR로 접안위치표식 및 도크를 인식하여 자동 접안하는 시스템을 개발
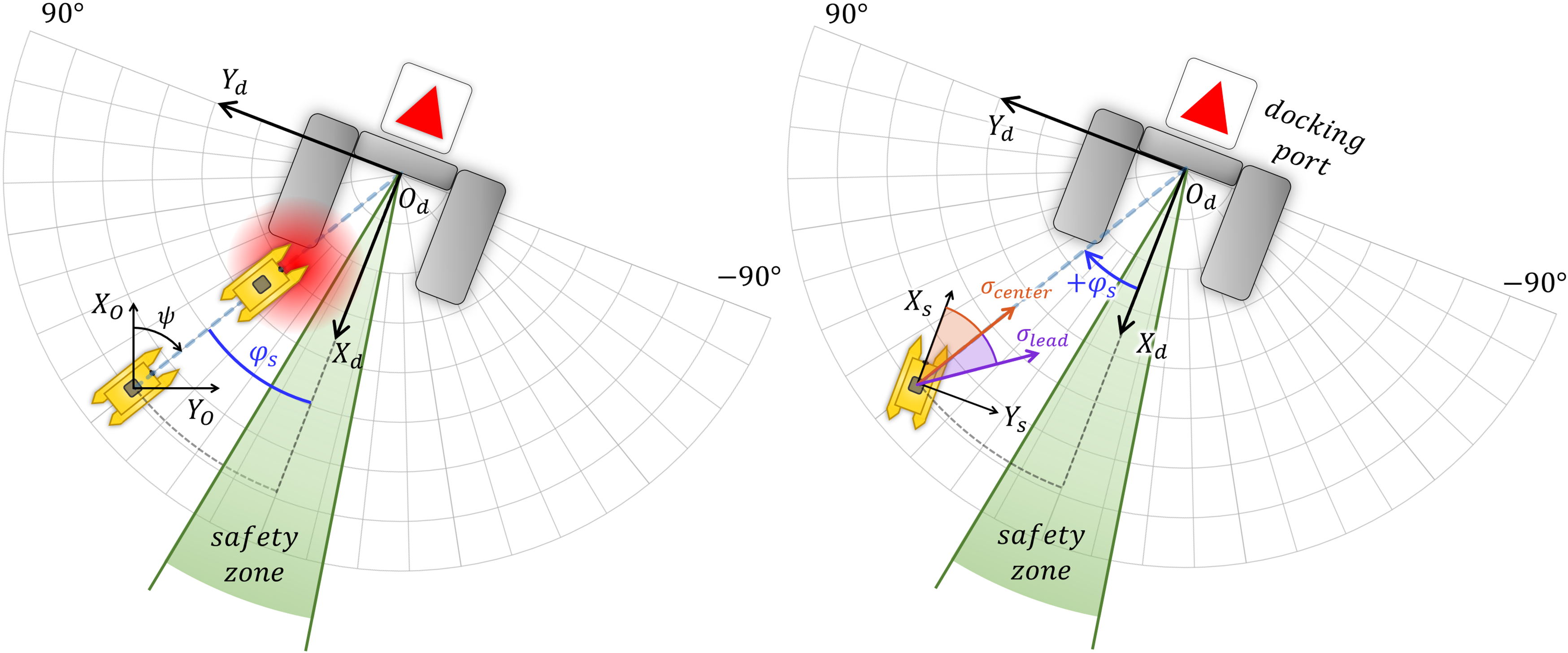
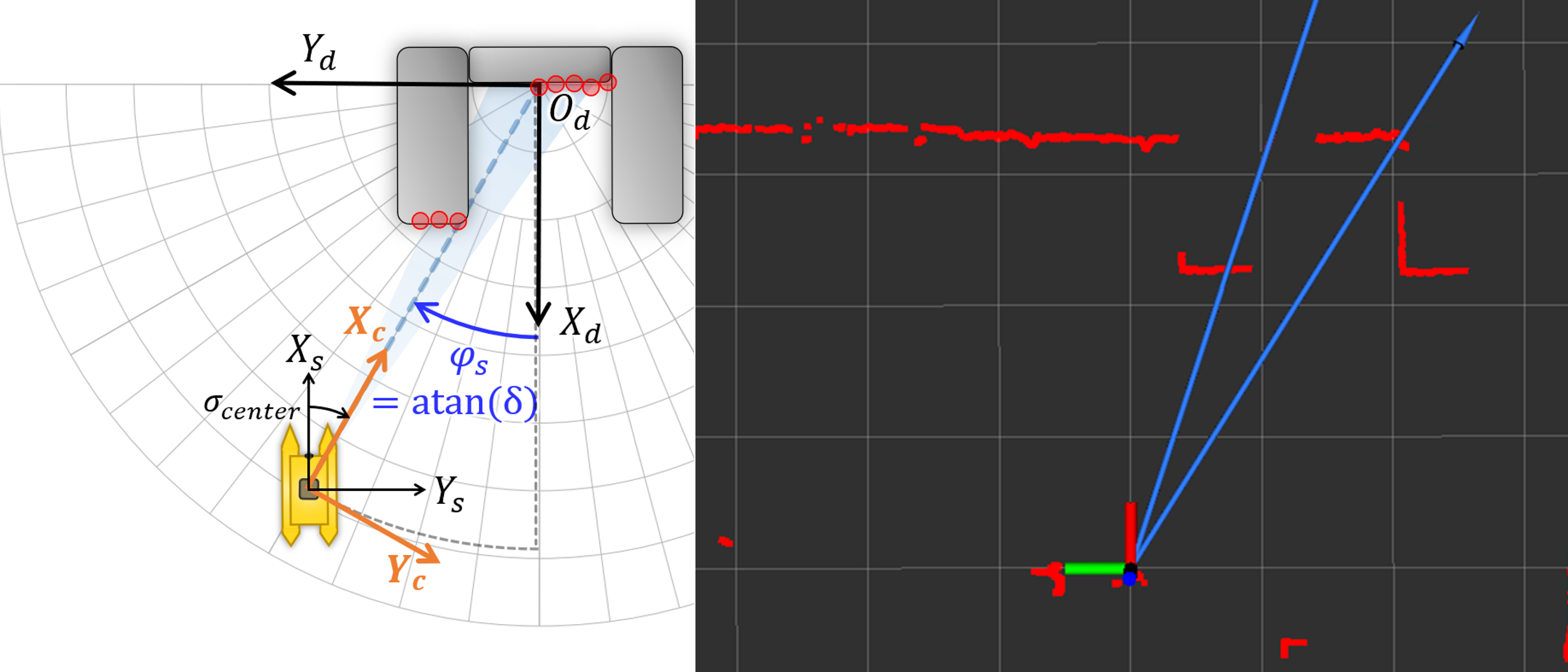
- 선수/앞섬 추적유도기법을 통해 접안 시 도크와의 충돌회피시스템을 작성
- 부경대학교 40m급 예인수조에서 자동 접안 시험을 수행
선박의 이/접안 데이터 분석
[NARA’s berthing video] [NARA’s unberthing video]
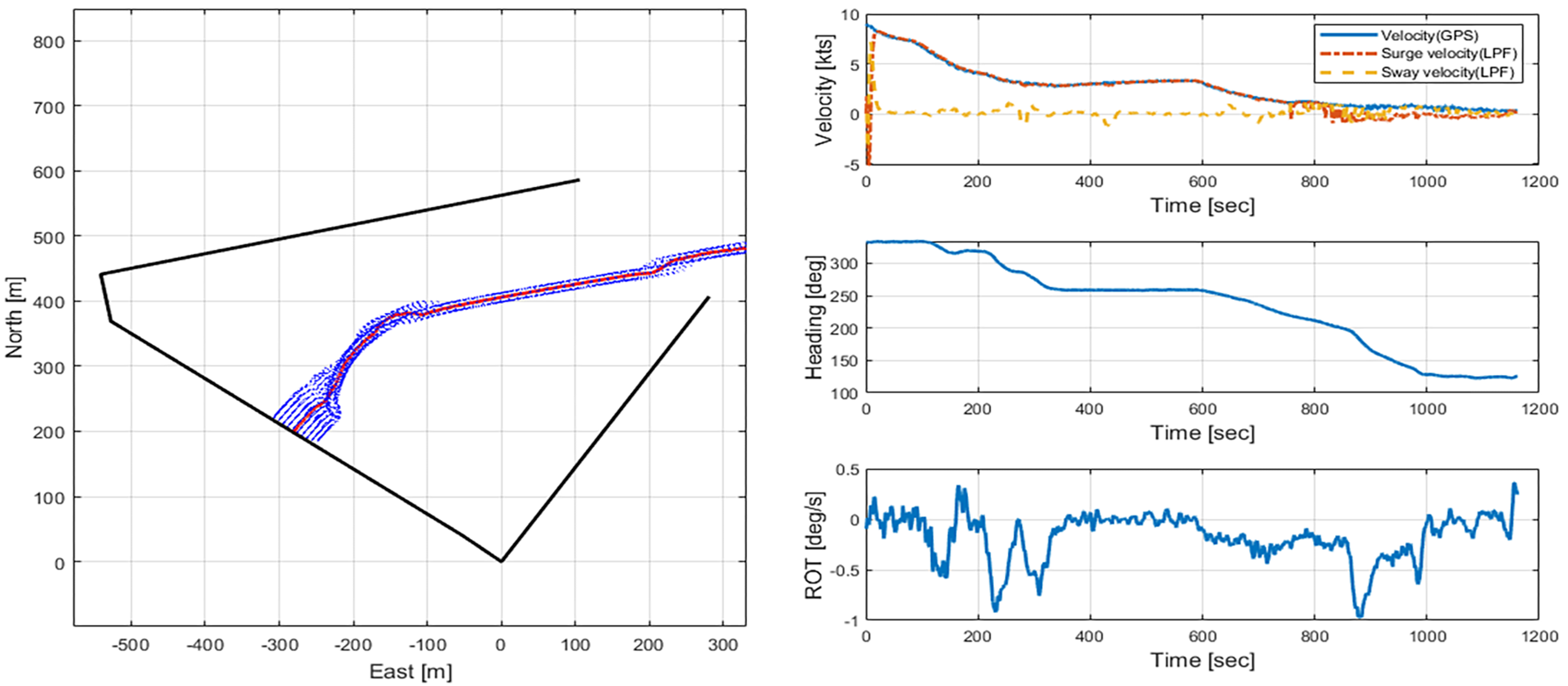
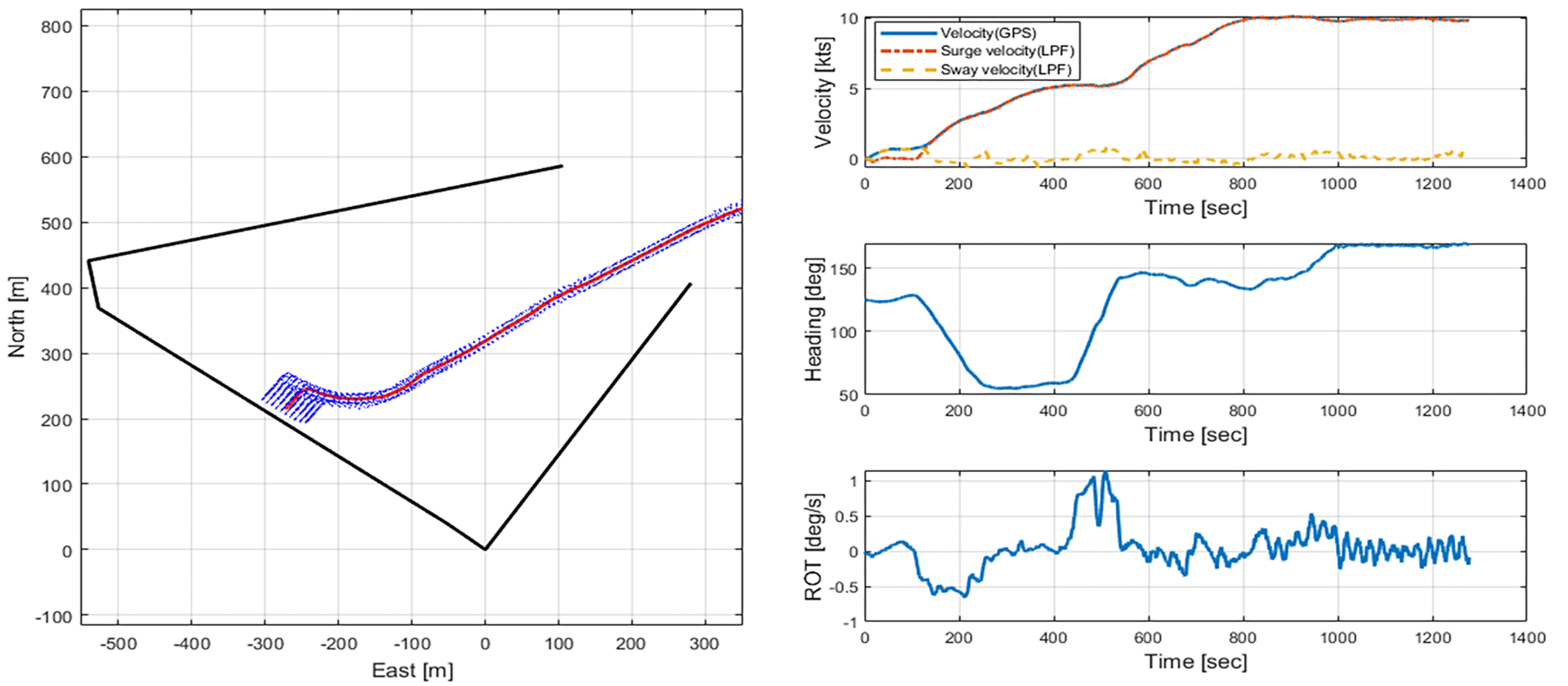
[ Berthing data of NARA ] [ Unberthing data of NARA ]
[ Simulation of crabbing motion for berthing ] [ Simulation of crabbing motion for unberthing ]
- 자율운항선박 이/접안 시스템 구현을 위해 실 운항자가 접안하는 패턴에 대한 분석 필요
- 국립부경대학교 실습선 나라호의 1년 간의 이/접안 데이터를 분석
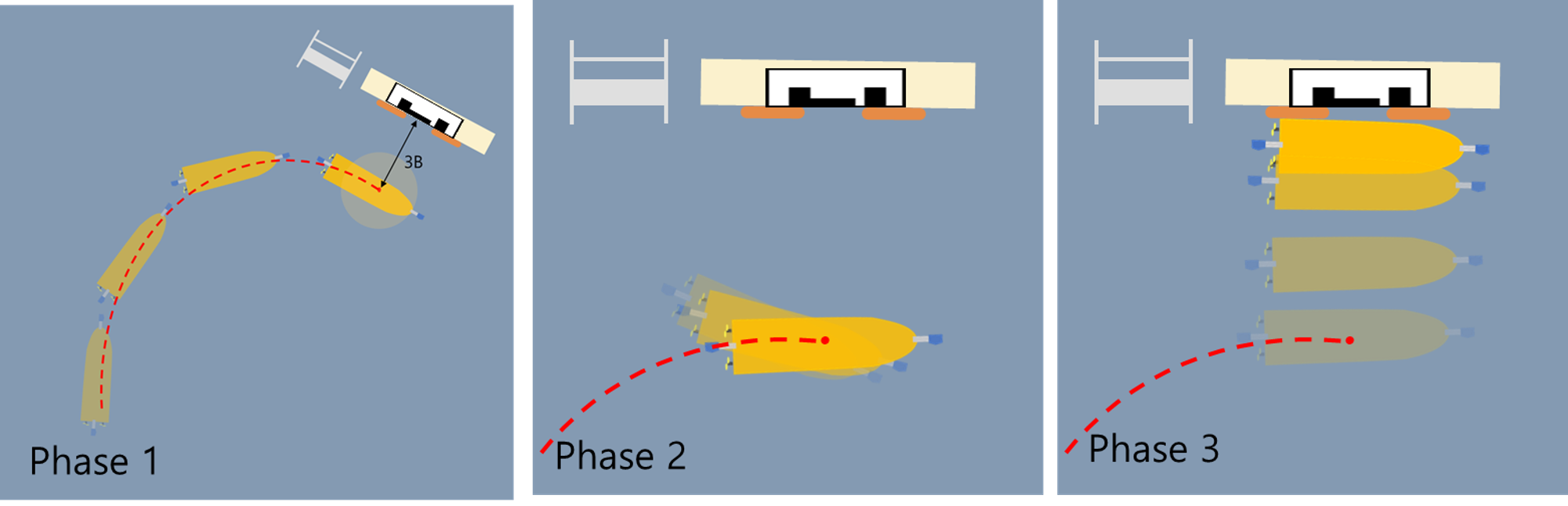
- 접안 단계: 안벽 근처로의 접근구간(approach), 안벽과 평행하도록 회전하는 피벗구간(pivot), 안벽에 접안하는 순수 횡이동 (crabbing)구간
- 순수 횡이동은 평균적으로 선폭의 3배 지점에서 수행됨을 확인하고, 이/접안 횡방향 속도 모델을 도출하여 모형시험에 적용
자율운항선박의 자동 이/접안 시스템 개발
[ Automatic berthing and unberthing test scenario configuration ]

[ Optimal path and vector field construction - Busan port scenario]
[ Relative position estimation based on Aruco markers ]
- 자율운항선박의 자동 이/접안 과정을 접근구간(phase1), 피벗구간(phase2), 순수 횡이동 구간(phase3)에 적합한 유도 · 제어기를 설계
- 창원대학교 사각수조 내 모의항만 구축, 부산항의 입항경로를 참고하여 접근구간에 해당하는 Dubins curve 및 vector field를 생성
- 카메라로 안벽 위 Aruco 마커를 인식하여 접안위치 식별 및 상대 위치 및 자세를 추정하고, LiDAR와의 센서 융합으로 데이터 정밀도 개선
외란관측기 기반 자동 이/접안 시스템
[ Relative position estimation based on Aruco markers ] [ Test result w/ disturbance, w/ DOBC ]
[ Automatic berthing test w/ disturbance, w/ DOBC ]
- 접안 과정 중 선박에 작용하는 환경외란을 고려하기 위해 안벽 근처에 바람생성기를 설치
- 환경외란에 강건하도록, 외란을 추정하고 이를 제어기에서 보상하는 외란관측기 기반 제어 알고리즘을 적용
- 횡방향 추력을 발생시키는 선수 · 선미 스러스터가 탑재된 2 m급 모형선박으로 자동 이/접안 시험을 수행
- 제어시스템의 외란에 대한 강건성을 검증
Push-pull 모드/Kick motion 기반 자동 이/접안 시스템
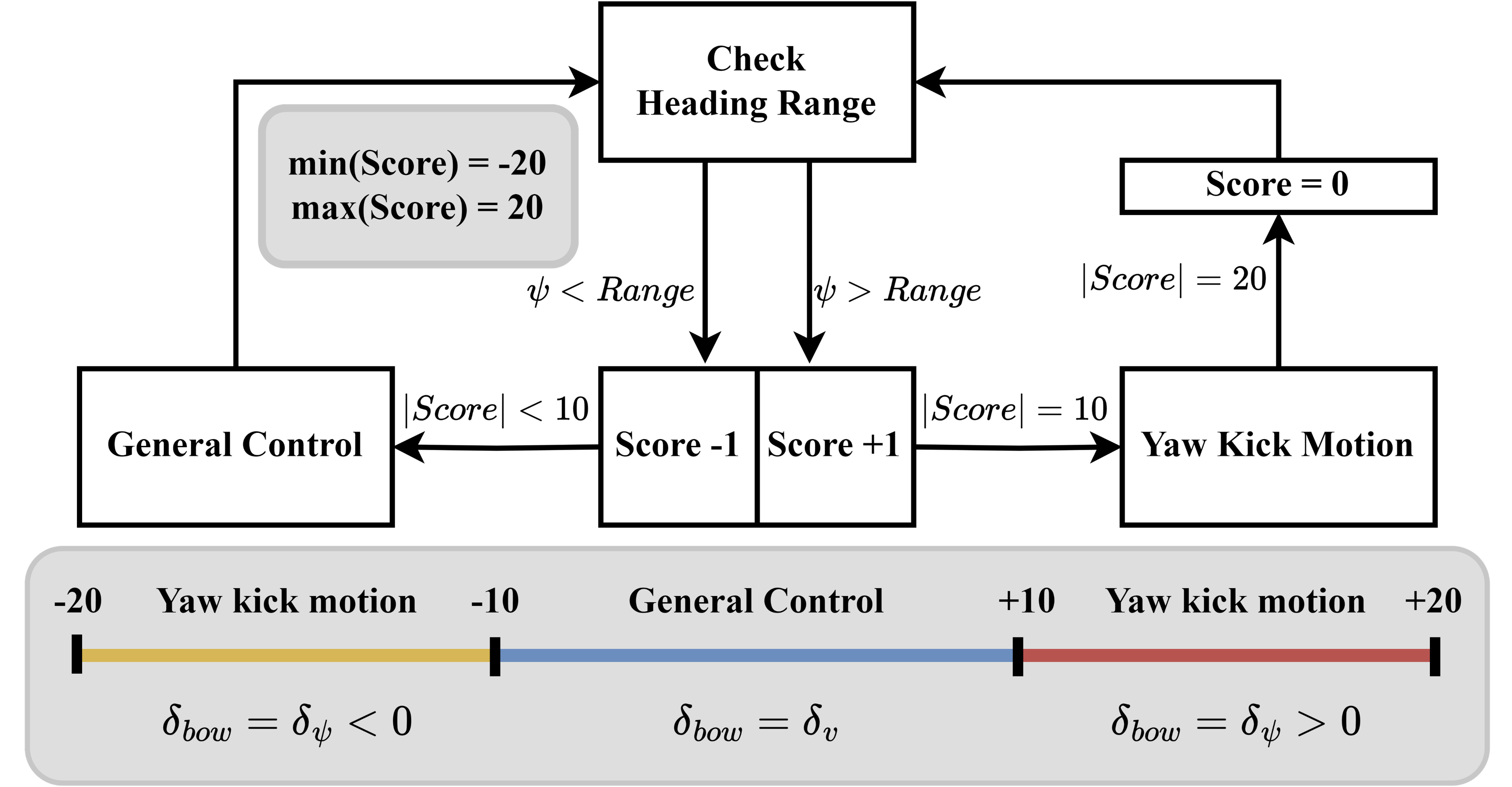
[ Block diagram of control system with kick motion ]
[ Test result of berthing using push-pull mode ]
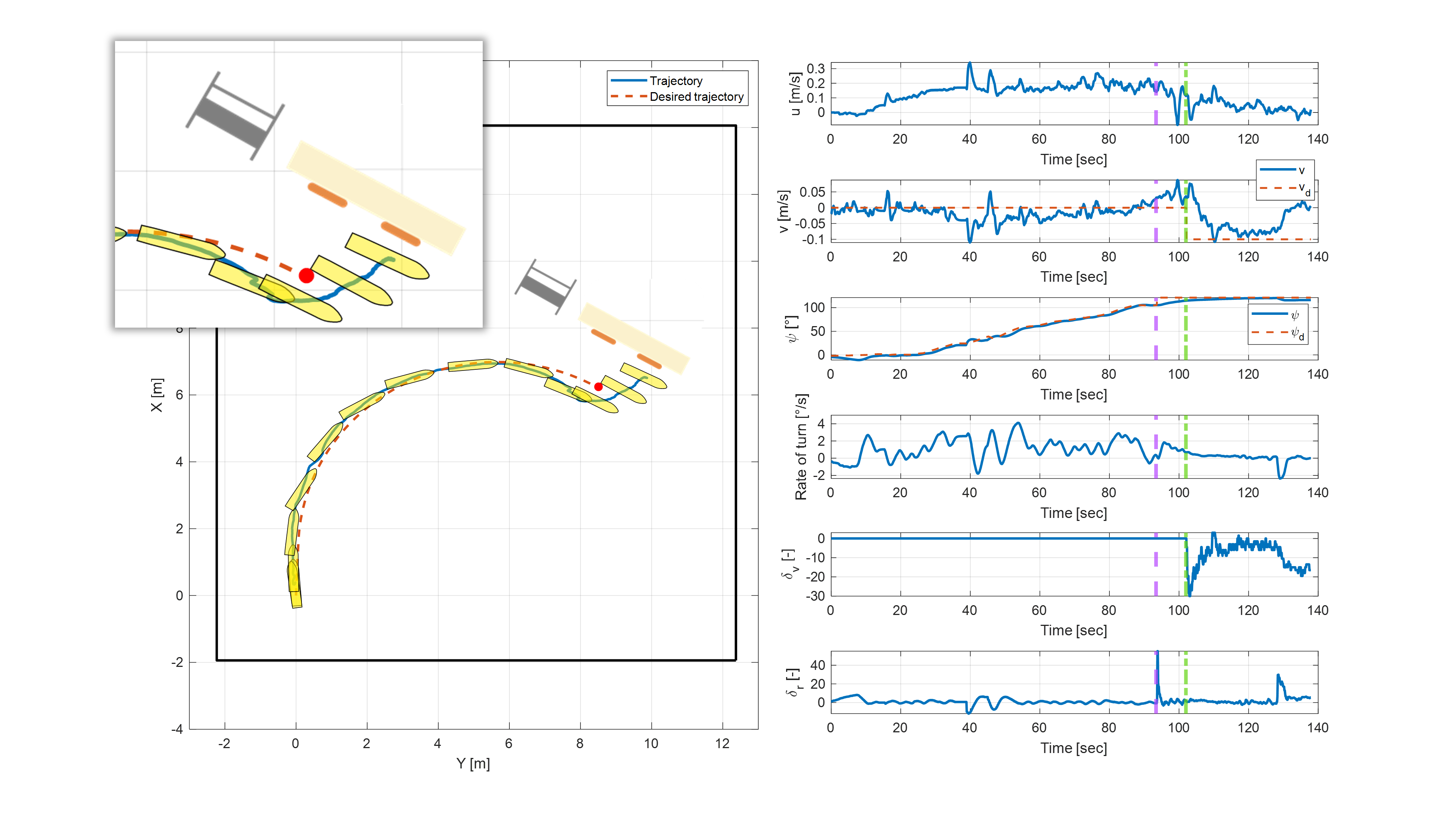
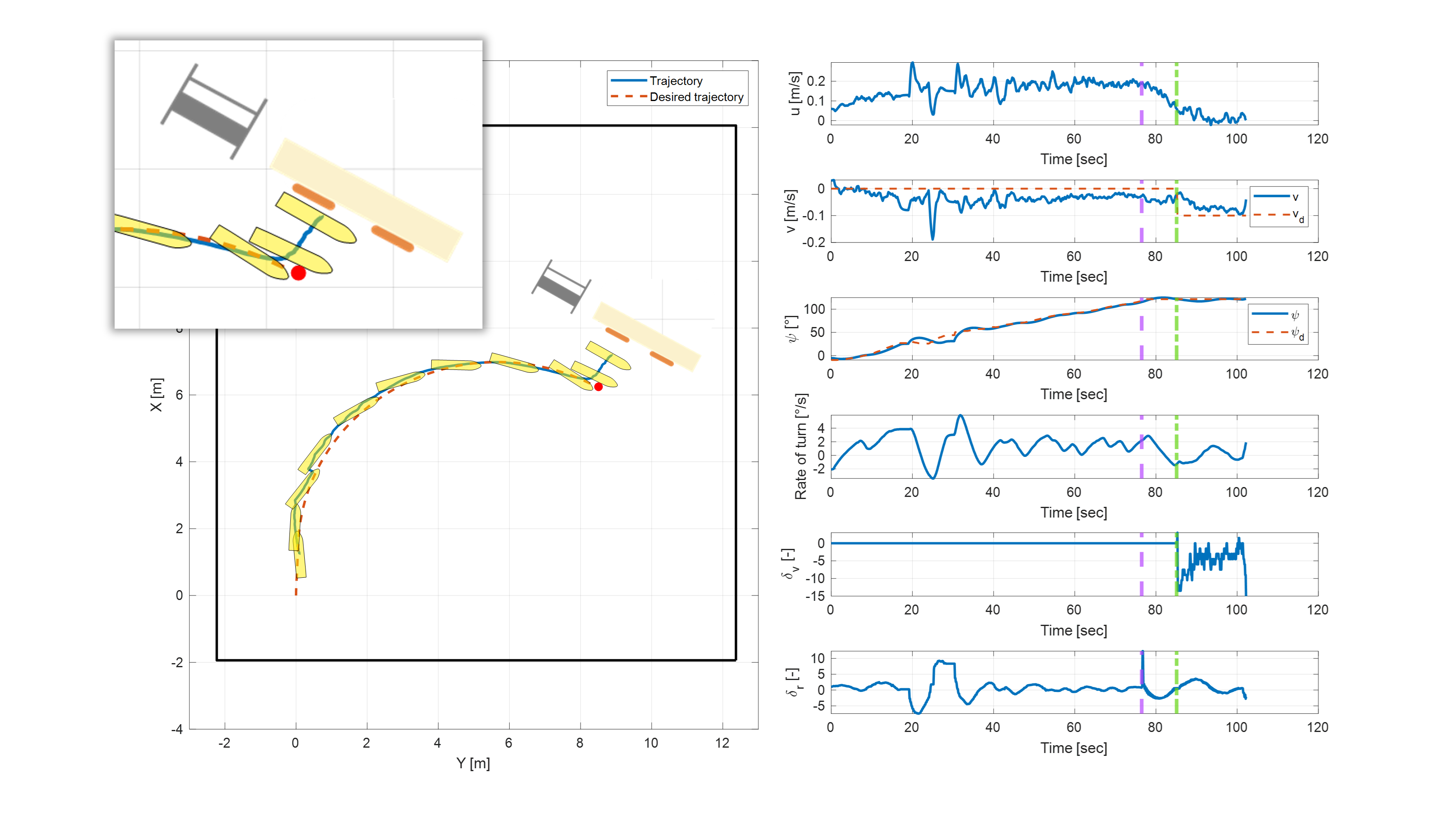
- 일반적인 선박 기반 좌 · 우현 프로펠러 및 타를 통해 횡방향 추력을 발생시키는 push-pull mode를 통한 자동 이/접안을 수행
- 시뮬레이션을 통해 검증한 push-pull mode를 모형선박에 적용하여 자동 이/접안 시험을 수행하여 제안하는 알고리즘의 성능을 검증
- Kick motion 기능을 추가