- 홈
- Research
- AUV
Research
AUV
연구 내용
안전운항영역 보호시스템 설계
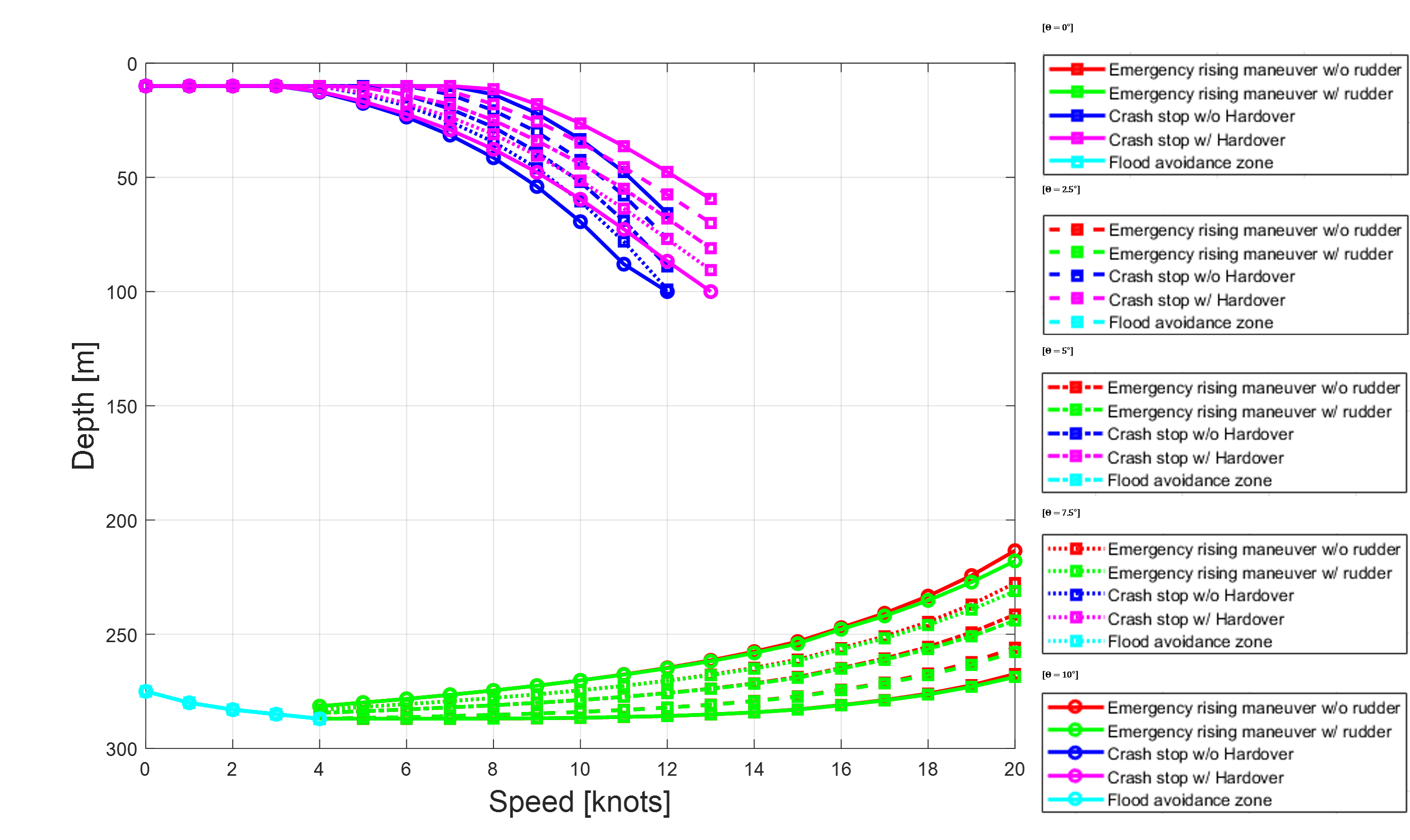
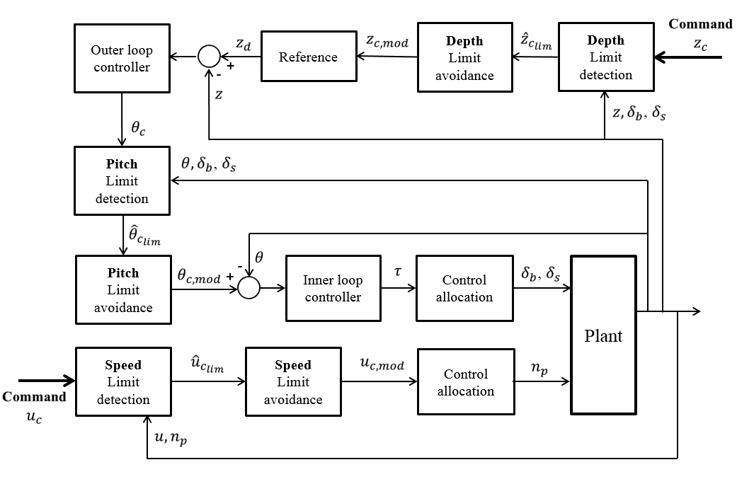
[ Safe operational envelope for a submarine ] [ Block diagram of limit protection architecture ]
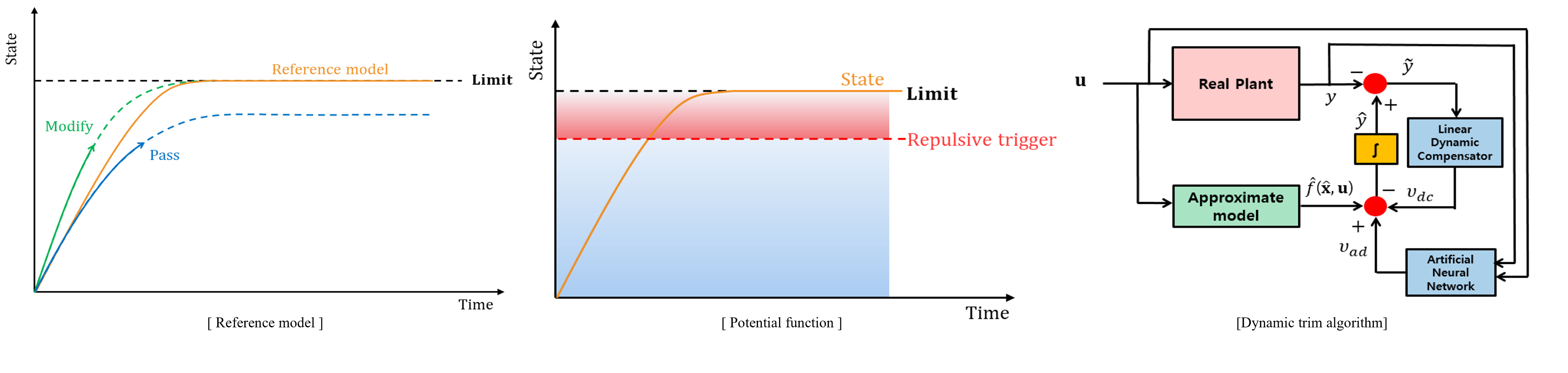
[ Algorithms of limit protection system ]
[ Simulation with depth and pitch limit protection system ]
[ Simulation without depth and pitch limit protection system ]
- 잠수함은 최대잠항심도 또는 스노클심도 근처에서 침수나 제어판의 오작동으로 인해 파괴심도로 이탈하거나 수면으로 부상하는 위험 존재
- → 안전운항영역 설정
- 안전운항영역으로의 이탈을 자동으로 방지할 수 있도록 비교모델, 포텐셜함수, 동적트림 알고리즘 기반 안전운항영역 보호시스템 설계
- 동적트림 알고리즘은 타 알고리즘 대비 정정시간을 50 %, 5% 단축하고 제어효율을 각각 60 %, 17% 개선
- 안전운항영역으로의 이탈을 방지함을 확인
심도 및 방향 제어시스템 설계
[ Algorithms of limit protection system ]
[ Simulation with depth and pitch limit protection system ]
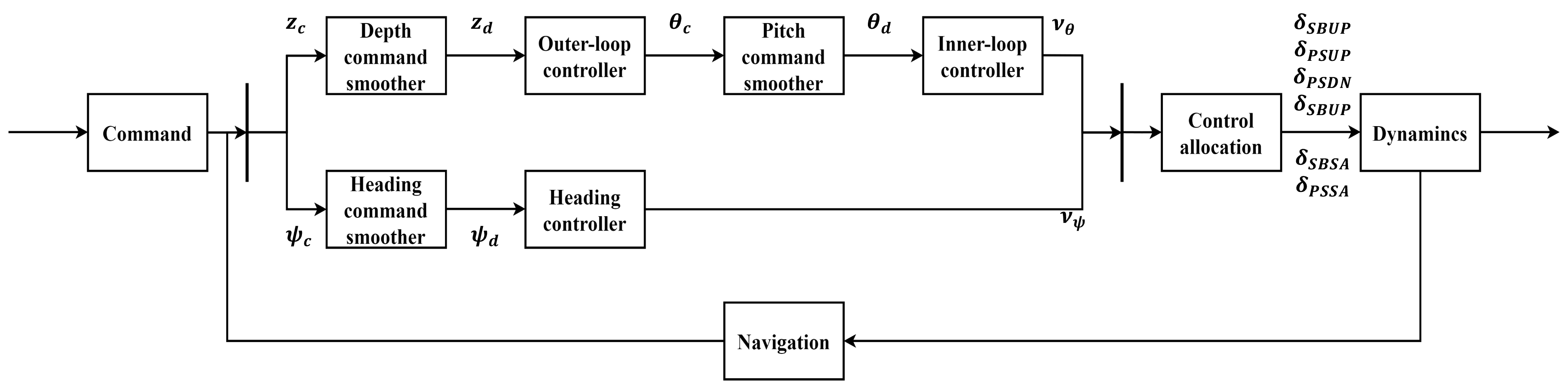
- 제어 초기 과도한 제어력을 방지하기 위한 명령스무더, 제어기, 제어력 할당 알고리즘으로 시스템 구성
- 외부 루프에서 심도 오차로 명령 종동요각을, 내부 루프에서 명령 종동요각 추종을 위한 제어력을 산출하는 이중루프 제어기 설계
- 의사역행렬 기반 제어력 할당 알고리즘 으로 제어기에서 산출된 제어력을 선수 제어판과 선미 X타에 할당
- MARIN 개발 선형인 BB2 모델을 대상으로 시뮬레이션 기반 검증
- 선박해양플랜트연구소의 선형수조와 장성호에서 자유항주모형시험을 통해 제어시스템 검증 수행